嵌入式开发相关
ESP32系列
ESP32开发环境
STM32系列
MPU6050
STM32_Freertos操作系统
STM32F1-OLED0.96(SPI版本)
WS2812
SG90舵机
HC-SR04
DHT11
大疆A型开发板
大疆C型开发板
STM32F103C8T6定时器中断触发LED翻转电平
Cubemx下载与安装教程
常用底盘运动学解算
嵌入式算法系列
PID控制——最常用的控制算法
FOC算法
DT遥控器与DR16接收机使用指南
MIT机械狗运动学逆解
本文档使用 MrDoc 发布
-
+
首页
FOC算法
稚晖君对于FOC理解 [https://zhuanlan.zhihu.com/p/147659820](https://zhuanlan.zhihu.com/p/147659820) 三相逆变电路 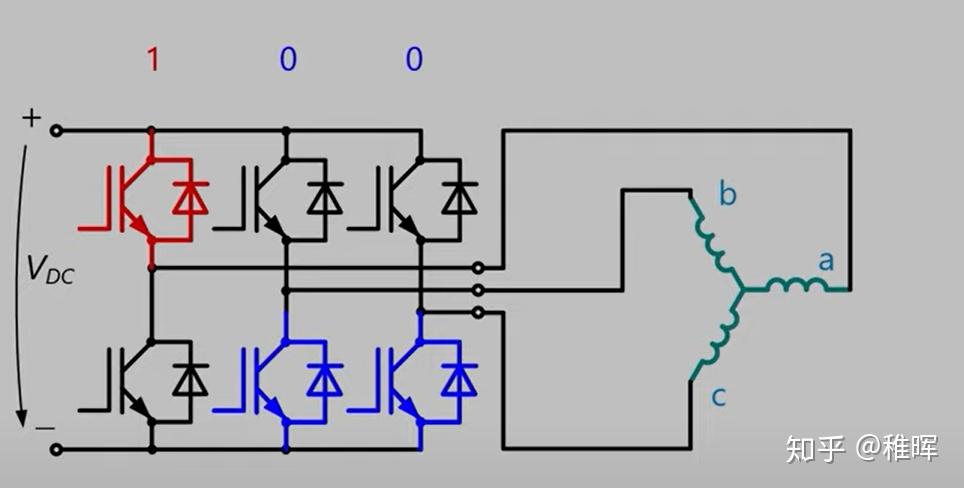 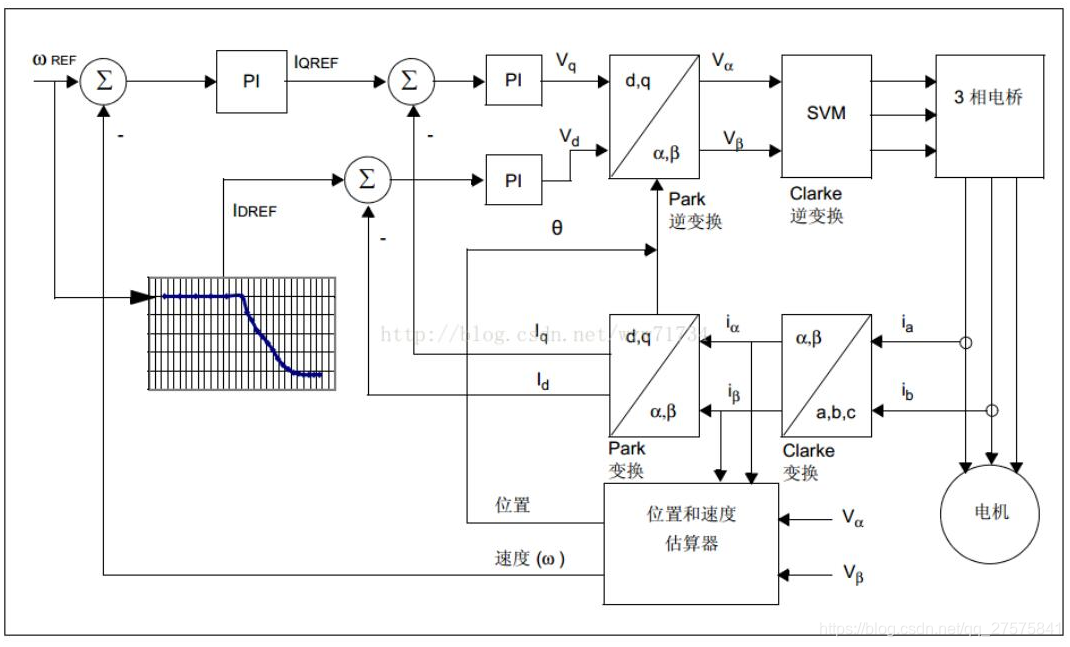 1、采集到两相电流 2、经过clarke变换后得到两轴正交电流量, 3、经过旋转变换后得到正交的电流量 Id、Iq,其中Iq与转矩有关,Id与磁通有关。在实际控制中,常将Id置为0。得到的这两个量不是时变的,因此可以单独的对这两个量进行控制,类似直流量控制一样。而不需要知道具体要给电机三相具体的电压为多少。 4、将第3步中得到的Iq与Id量分别送进PI调节器,得到对应的输出Vq和Vd; 5、通过传感器得到电机转过的角度。 6、进行逆park变换,得到二轴电流量。 7、对第6步中的Va,Vb进行逆clarke变换,得到实际需要的三相电压输入给逆变电桥,驱动电机转动。
cqutflame
2025年3月31日 12:29
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码