嵌入式开发相关
ESP32系列
ESP32开发环境
STM32系列
MPU6050
STM32_Freertos操作系统
STM32F1-OLED0.96(SPI版本)
WS2812
SG90舵机
HC-SR04
DHT11
大疆A型开发板
大疆C型开发板
STM32F103C8T6定时器中断触发LED翻转电平
Cubemx下载与安装教程
常用底盘运动学解算
嵌入式算法系列
PID控制——最常用的控制算法
FOC算法
DT遥控器与DR16接收机使用指南
MIT机械狗运动学逆解
本文档使用 MrDoc 发布
-
+
首页
MPU6050
*STM32F103C8T6——MPU6050工程示例代码* [【附件】STM32_F1_MPU6050.zip](/media/attachment/2025/03/STM32_F1_MPU6050.zip) MPU6050的数据格式 我们感兴趣的数据位于0x3B到0x48这14个字节的寄存器中。这些数据会被动态更新,更新频率最高可达1000HZ。下面列出相关寄存器的地址,数据的名称。注意,每个数据都是2个字节。 0x3B,加速度计的X轴分量ACC_X 0x3D,加速度计的Y轴分量ACC_Y 0x3F,加速度计的Z轴分量ACC_Z 0x41,当前温度TEMP 0x43,绕X轴旋转的角速度GYR_X 0x45,绕Y轴旋转的角速度GYR_Y 0x47,绕Z轴旋转的角速度GYR_Z MPU6050芯片的坐标系是这样定义的:令芯片表面朝向自己,将其表面文字转至正确角度,此时,以芯片内部中心为原点,水平向右的为X轴,竖直向上的为Y轴,指向自己的为Z轴。见下图: 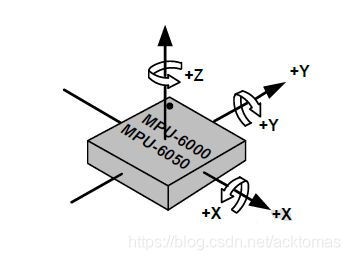 ## STM32Cubemx如何配置MPU6050 ### 1.芯片选择 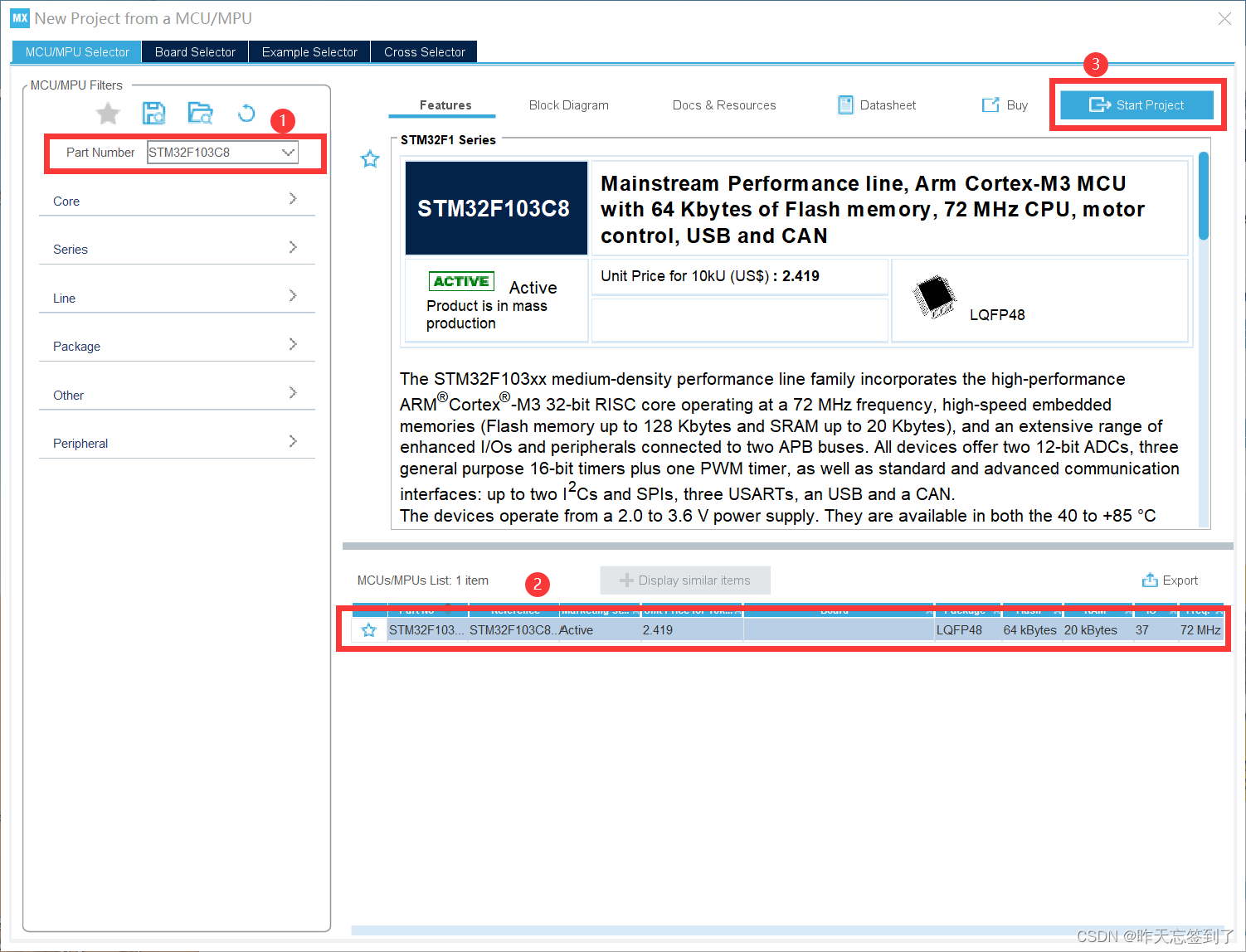 ### 2.配置RCC、SYS、时钟树 2.1配置RCC 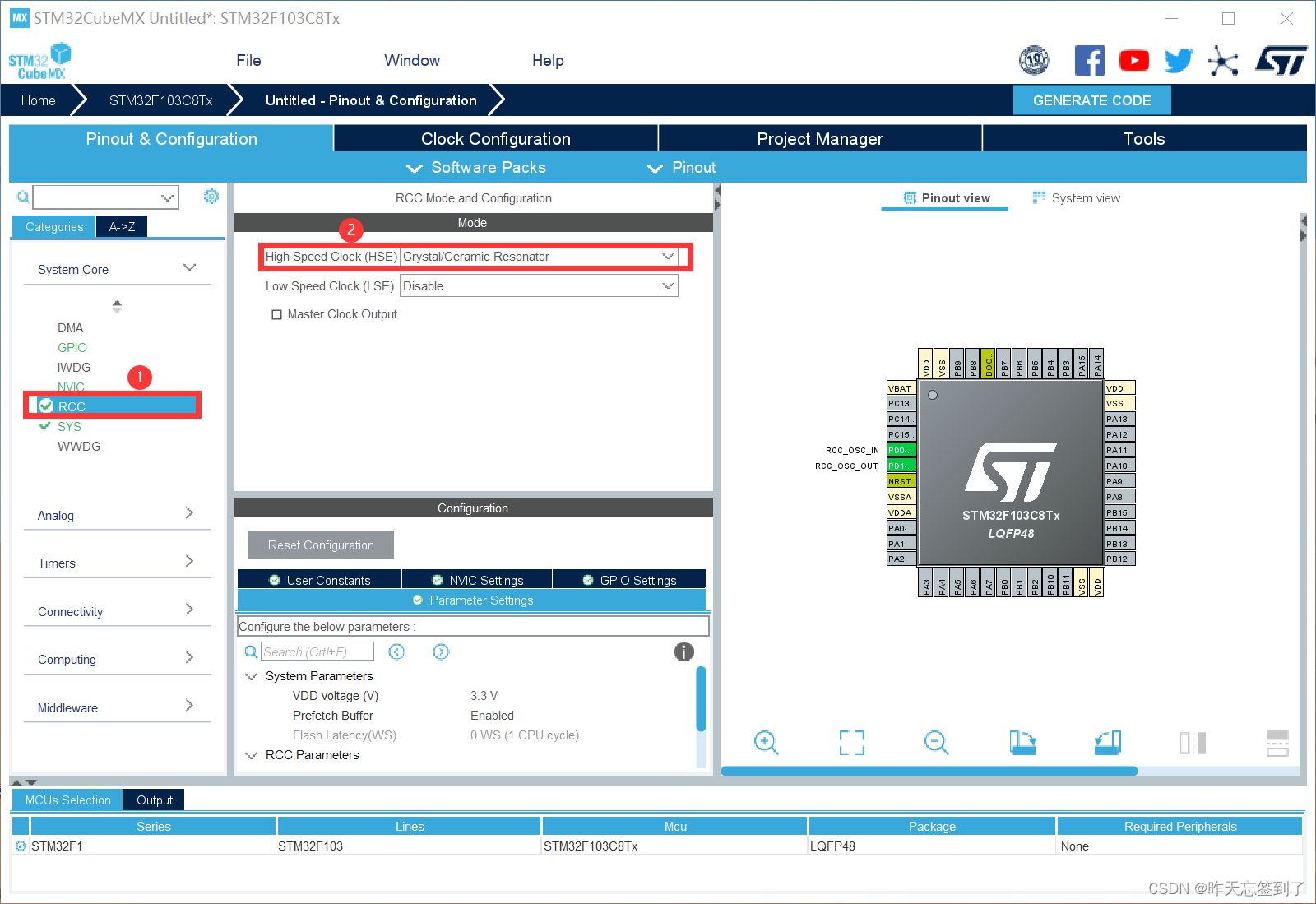 2.2配置SYS 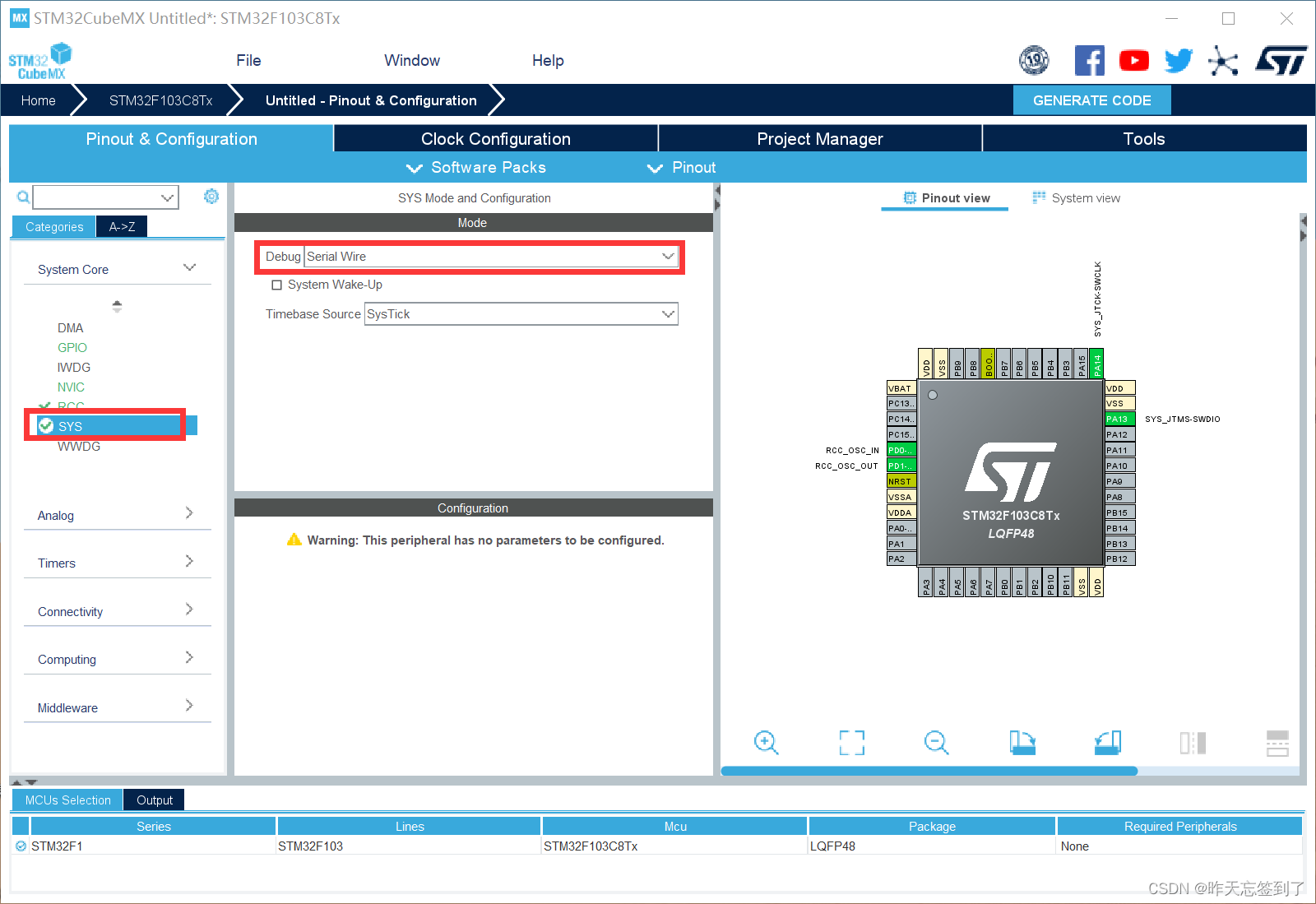 2.3配置时钟树 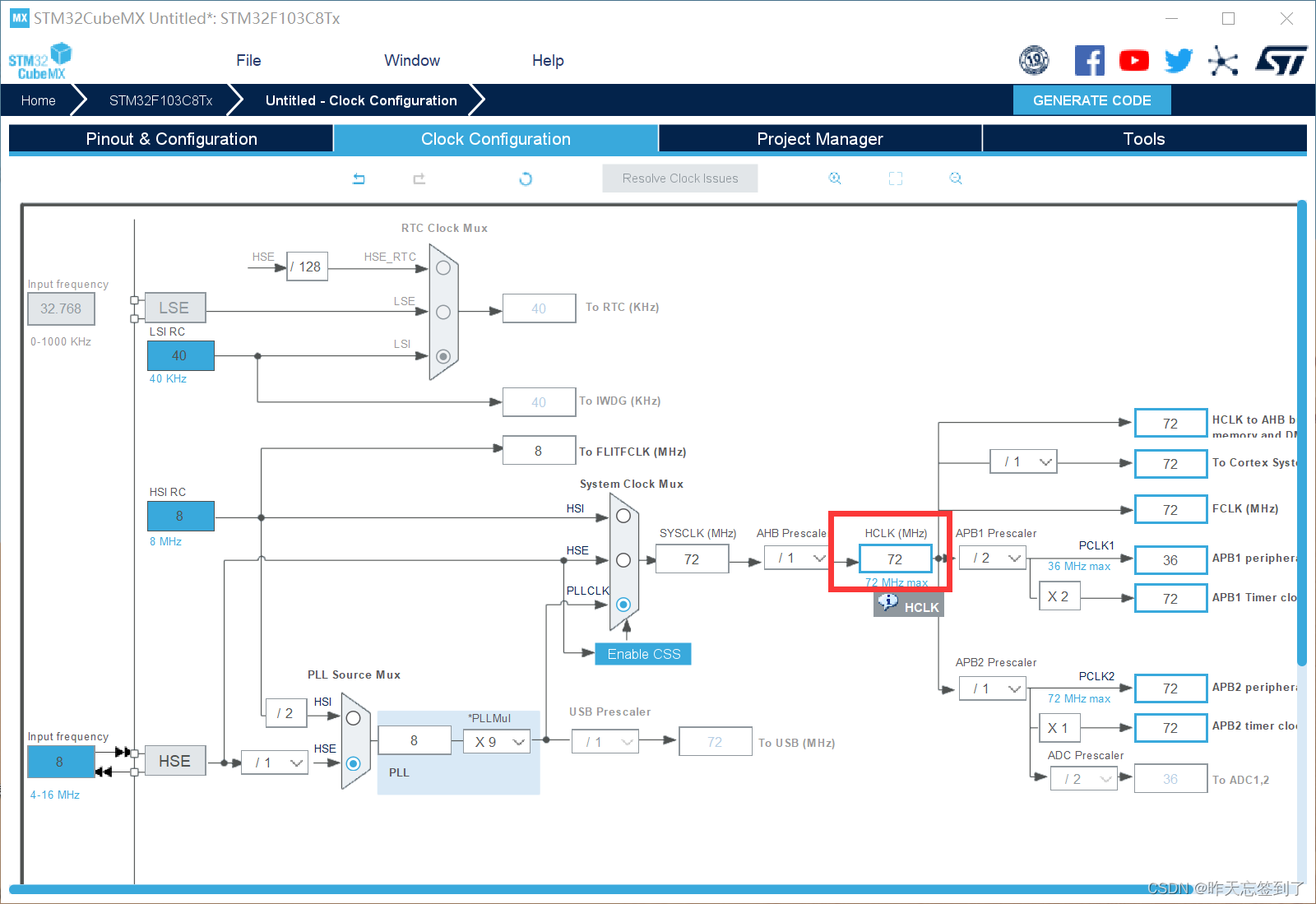 ### 3.配置GPIO 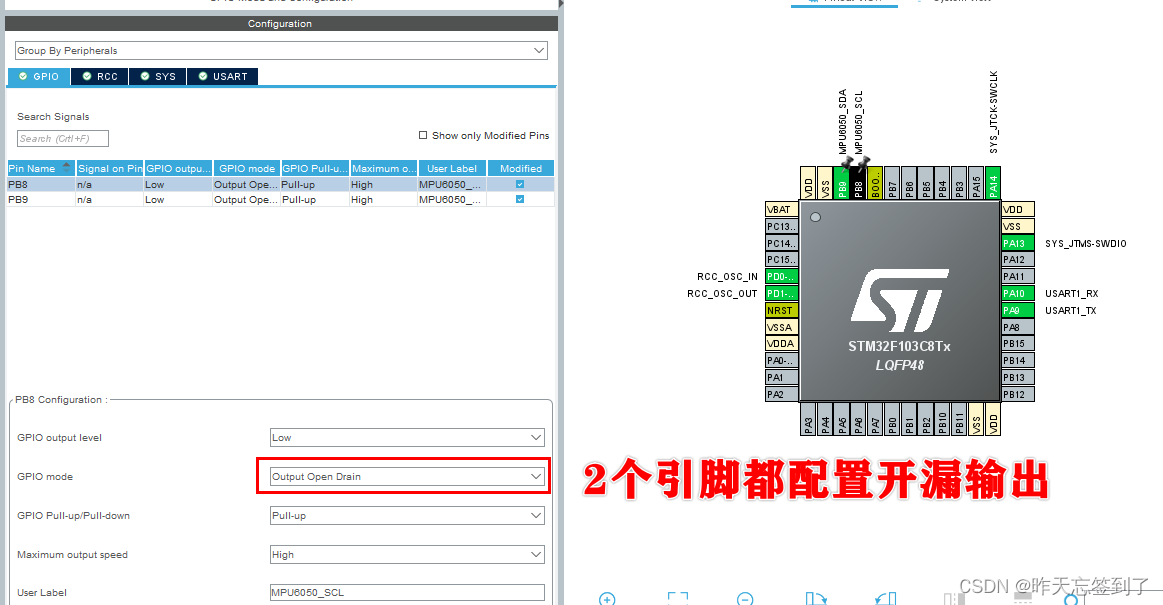 ### 4.配置串口 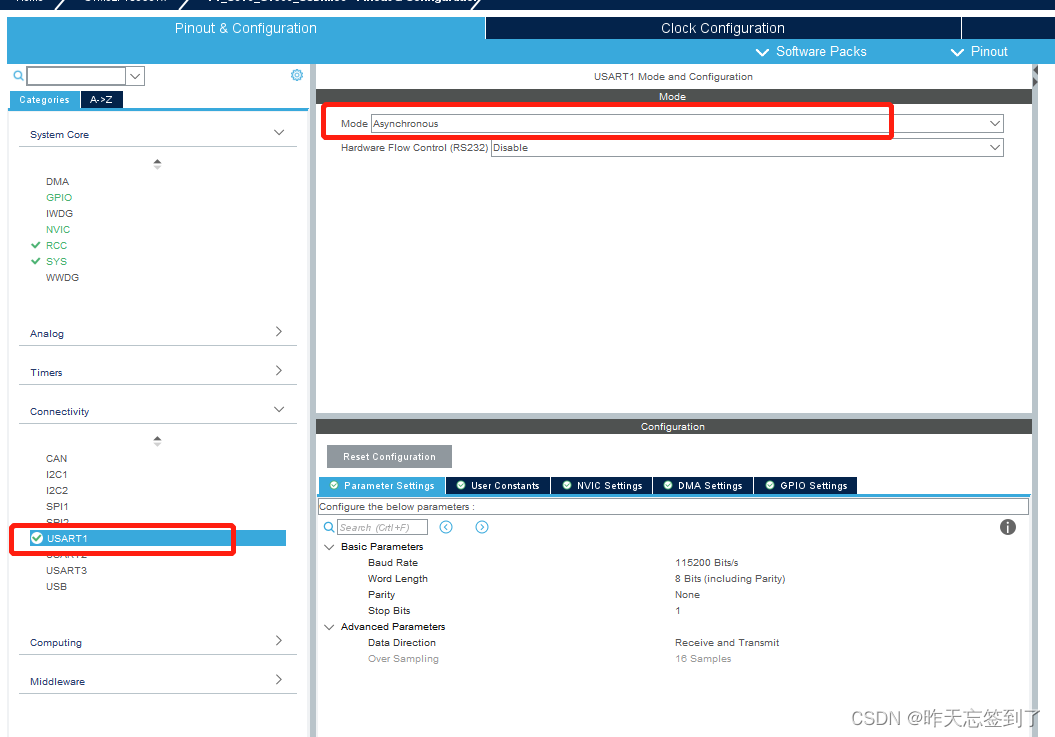 ### 5.设置路径、生成代码工程 教程出处 [链接](https://blog.csdn.net/lwb450921/article/details/123575209)
cqutflame
2025年3月29日 13:37
转发文档
收藏文档
上一篇
下一篇
手机扫码
复制链接
手机扫一扫转发分享
复制链接
Markdown文件
PDF文档(打印)
分享
链接
类型
密码
更新密码